
前回はBluetoothキーボードライブラリを使ってM5StackをBluetoothキーボード化してみた。今回は同じ開発者が提供しているBluetoothマウスライブラリを使って、Bluetoothマウス化してみる。
https://github.com/T-vK/ESP32-BLE-Mouse
Zip形式でライブラリを追加しておく。
マウスの操作方法はジョイスティックを使う等色々考えられるが、今回はMPU9250のジャイロセンサーを使用する。I2C接続で繋いでおく。
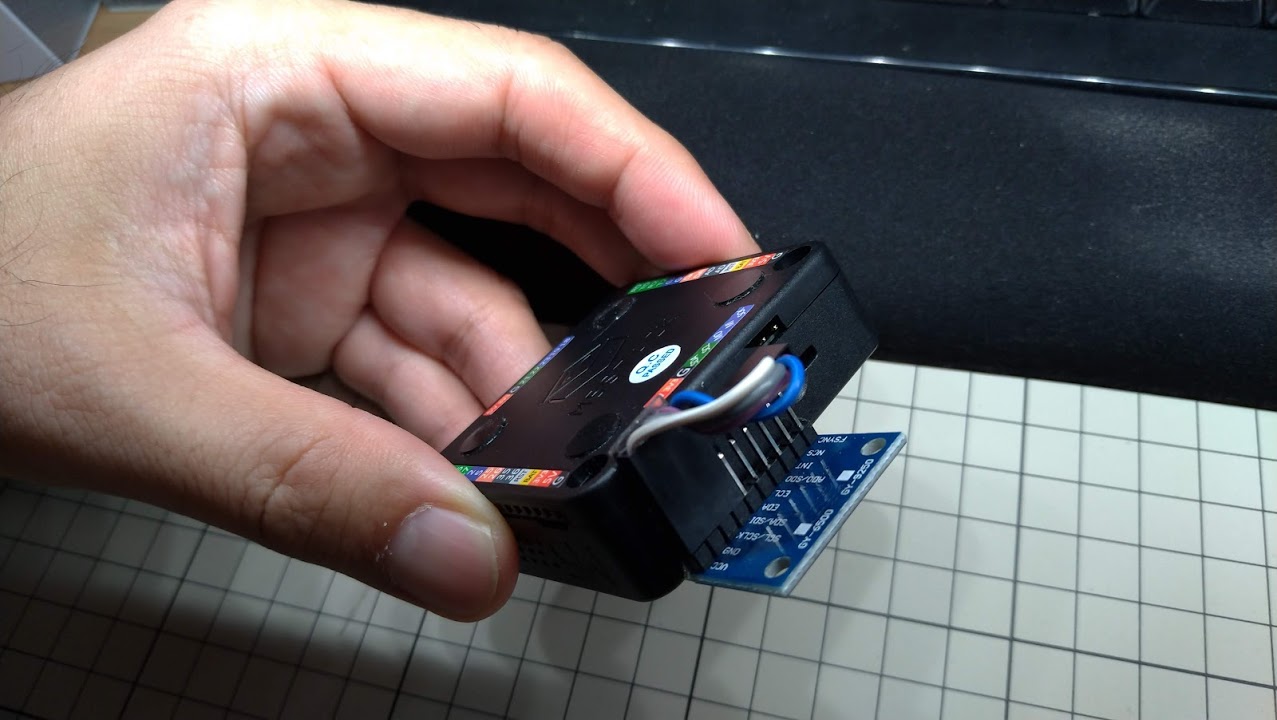
M5Stackの種類によってはジャイロセンサー内蔵タイプもあるので、そういったモデルであれば完全にM5Stack単体で済む。M5Stackの種類については下記サイトが分かり易くまとめられている。
スケッチは以下の通り。持ち方を考えて、M5Stackを上下逆にしている。ボタンCは左クリック、ボタンAは右クリック、ボタンBを押しながら傾けるとスクロールにしている。ジャイロセンサーもライブラリで簡単に使えるので、スケッチもこれだけで済む。
#define M5STACK_MPU9250
#include <M5Stack.h>
#include <BleMouse.h>
#define GYRO_CHECK_INTERVAL 10
#define GYRO_CHECK_INTERVAL_WHEEL 30
BleMouse bleMouse("M5 GyroMouse");
bool blestate = false;
bool wheelmode = false;
int gyrointerval = GYRO_CHECK_INTERVAL;
signed char mousex, mousey, mwheel;
int ipitch, iroll, iyaw;
float pitch, roll, yaw;
char chbuff[32];
unsigned long current_millis, last_millis = 0;
void showstate(char *txt) {
M5.Lcd.setCursor(0, 120);
M5.Lcd.fillRect(0, 120, 320, 20, BLACK);
M5.Lcd.printf(txt);
}
void showgyro(char *txt) {
M5.Lcd.setCursor(0, 140);
M5.Lcd.printf(txt);
}
void setup() {
M5.begin();
M5.Power.begin();
bleMouse.begin();
M5.Lcd.clear(BLACK);
M5.Lcd.setRotation(3);
M5.Lcd.setTextSize(2);
M5.Lcd.println("Gyro Mouse");
M5.Lcd.println("C: Left");
M5.Lcd.println("B: Wheel (Hold)");
M5.Lcd.println("A: Right");
showstate("Disconnected");
M5.IMU.Init();
}
void loop() {
M5.update();
current_millis = millis();
if (bleMouse.isConnected()) {
if (!blestate) {
blestate = true;
showstate("Connected");
}
if (current_millis - last_millis > gyrointerval) {
M5.IMU.getAhrsData(&pitch, &roll, &yaw);
sprintf(chbuff, "%.1f %.1f %.1f ", pitch, roll, yaw);
ipitch = (int)pitch;
iroll = (int)roll;
iyaw = (int)yaw;
showgyro(chbuff);
if (wheelmode) {
mousex = 0;
mousey = 0;
if (abs(ipitch) >= 10)
mwheel = (signed char)(ipitch / 10);
} else {
mousex = (signed char)((iroll < 0 ? min(0, iroll + 10) : max(0, iroll - 10)) / 10);
mousey = -1 * (signed char)((ipitch < 0 ? min(0, ipitch + 10) : max(0, ipitch - 10)) / 10);
mwheel = 0;
}
bleMouse.move(mousex, mousey, mwheel);
last_millis = current_millis;
}
if (M5.BtnA.wasPressed()) {
bleMouse.press(MOUSE_RIGHT);
} else if (M5.BtnA.wasReleased()) {
bleMouse.release(MOUSE_RIGHT);
} else if (M5.BtnB.wasPressed()) {
wheelmode = true;
gyrointerval = GYRO_CHECK_INTERVAL_WHEEL;
} else if (M5.BtnB.wasReleased()) {
wheelmode = false;
gyrointerval = GYRO_CHECK_INTERVAL;
} else if (M5.BtnC.wasPressed()) {
bleMouse.press(MOUSE_LEFT);
} else if (M5.BtnC.wasReleased()) {
bleMouse.release(MOUSE_LEFT);
}
} else {
if (blestate) {
blestate = false;
showstate("Disconnected");
}
}
}
PCとペアリングして操作した様子を動画に撮ってみた。GPD MicroPCとペアリングしようとしてみたが、なぜかこちらは上手くペアリングできなかった。

This post is also available in: 英語


